Description
Descripción del producto
El Ping360 es un sonar mecánico para navegación generación de imágenes acústicas. Tiene un alcance 50 m, puede sumergirse hasta 300 m de profundidad y gracias a una interfaz de código abierto es la herramienta ideal para navegación en ROVs.
El sonar esta diseñado para ser usado en el BLUEROV2 y otros ROVs para navegación en condiciones de baja visibilidad en el agua. ¡También es adecuado para aplicaciones como inspección, esquivar obstáculos, localizar objetivos, desarrollar sistemas autónomos y más!
Caso de uso
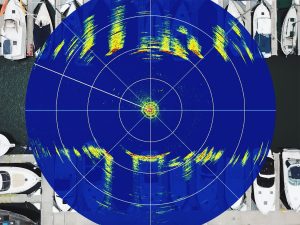
En el siguiente enlace podrás encontrar un caso de éxito donde se aprecian los resultados de un ping 360 para la detección de obstáculos.
- Detección de obstáculos usando un BLUEROV2 y el Ping 360
Que incluye
Sonar
1 x Ping360 scanning sonar con cable y pasacable pre-instalado
1 x tuerca para pasacable
1 x O-ring para el pasacable
1 x Caja de almacenamiento y transporte
Montaje sonar Ping360
1 x Soporte de montaje para el sonar Ping360
4 x Tornillos cabeza tipo botón M3x5
2 x Tornillos cabeza tipo botón M5x12
Cables
1 x Adaptador JST-GH de 4 pines a JST-GH de 4 pines para PCB
1 x Adaptador JST-GH de 4 pines a USB-A (para configuración USB)
1 x Adaptador JST-GH de 4 pines a conector macho (para configuración RS-485)
Detalles Técnicos
Especificaciones
| Parámetro | Valor | ||||||||
| Eléctricos | |||||||||
| Máximo voltaje a suministrar | 25 V | ||||||||
| Mínimo voltaje a suministrar | 11 V | ||||||||
| Máximo consumo de potencia | 5 W | ||||||||
| Comunicaciones | |||||||||
| Protocolo de la señal | USB, Ethernet (UDP), RS485 | ||||||||
| Protocolo del mensaje | Protocolo ping | ||||||||
| Subconjunto de mensaje | Common, ping360 | ||||||||
| Códigos de librerías para su implementación | Python, C++, Arduino | ||||||||
| Cable | |||||||||
| Cable usado | Cable de alta temperatura para entornos subacuáticos (PUR Subsea) | ||||||||
| Longitud del cable | 755 mm | ||||||||
| Calibre del cable | 28 AWG | ||||||||
| Cables de alimentación |
|
||||||||
| Configuración USB |
|
||||||||
| Configuración Ethernet |
|
||||||||
| Configuración RS485 |
|
||||||||
| Pasacables a instalar | |||||||||
| Lado del dispositivo | Wetlink M10 de 4.5 mm LC | ||||||||
| Terminación del cable | Wetlink M10 de 4.5 mm LC | ||||||||
| Acústicos | |||||||||
| Frecuencia | 750 kHz | ||||||||
| Ancho del beam – horizontal | 2° | ||||||||
| Ancho del beam – vertical | 25° | ||||||||
| Alcance mínimo | 0. 75 m | ||||||||
| Alcance máximo | 50 m | ||||||||
| Resolución del alcance | 0.08% del alcance | ||||||||
| Resolución del alcance a 50 m | 4.1 cm | ||||||||
| Resolución del alcance a 2 m | 1.6 mm | ||||||||
| Resolución mecánica | 0.9° | ||||||||
| Sección de escaneo | Variable hasta 360° | ||||||||
| Velocidad de escaneo para 2 m | 9 s / 360° * | ||||||||
| Velocidad de escaneo para 50 m | 35 s / 360° * | ||||||||
| ¿Escaneo continuo de los 360°? | Si | ||||||||
| ¿Offset del ángulo de montaje? | Si | ||||||||
| Físicos | |||||||||
| Profundidad de operación del equipos | 300 m | ||||||||
| Rango de temperatura | 0° – 30° | ||||||||
| Peso en el aire (con cable) | 510 g | ||||||||
| Peso en el agua (con cable) | 175 g | ||||||||
| Tornillos de montaje | M3 x 0.5mm x 5 mm | ||||||||
| Tornillo del soporte del montaje | M5 x 0.8 mm x 12 mm | ||||||||
*Se espera que esto valores mejoren con la optimización del software
Dibujos 2D
Ping 360 |
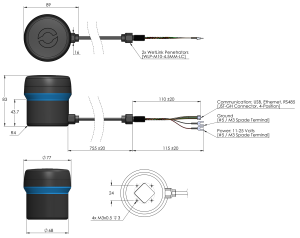 |
Montaje Ping 360 |
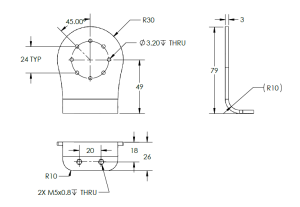 |