Description
Descripción del producto
El BlueROV2 es el ROV más asequible y de alto rendimiento del mundo. Con una configuración de 6 propulsores vectorizados, 4 luces, electrónica y software de código abierto y múltiples accesorios para la expansión de sus capacidades, lo convierten en el ROV perfecto para tus inspecciones subacuáticas. Además, ¡el BlueROV2 es uno de los drones submarinos más populares del mercado!
Que incluye:
1 x BlueROV2 con 4 luces (housing para operar hasta 300 m de profundidad de aluminio o housing para operar hasta 100 m de profundidad de acrílico)
1 x cable umbilical Fathom (Alternativas de selección para la longitud del cable 25 M, 50 M, 100 M, 150 M, 200 M, 300 M)
1 x Interfaz para el cable umbilical Fathom-X (FXTI)
1 x Caja de almacenamiento y transporte
1 x Batería de Litio-Polímero de 14.8 V y 15.6 Ah
1 x Cargador de baterías H6 PRO Lithium Battery Charger
Que no incluye:
- Un control de video juegos. Se recomienda el control Xbox One Wireless o el Logitech F310 Gamepad (como opciones más económicas).
- Un PC portátil o tablet con Windows 10. El software de control en superficie QGroundControl, opera en Mac, Windows 10 and 11, y Linux. Ver los detalles más adelante.
Detalles Técnicos
Especificaciones
| Parámetros | Valor |
| Físicos | |
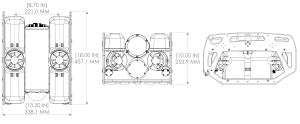
| Largo(L) | 457 mm |
| Ancho (W) | 338 mm |
| Alto (H) | 254 mm |
| Peso en el aire (con lastre por defecto) | 11 – 12 kg |
| Peso en el aire (sin lastre por defecto) | 9 – 10 kg |
| Capacidad de carga (depende de la configuración) | 1.2 kg con 4 luces |
| Agujeros para conectores de cable | 18 en total, 6 disponibles para expansión de capacidades |
| Housing electrónica (alojamiento estanco) | Blue Robotics 4″ serie WTE |
| Housing batería (alojamiento estanco) | Blue Robotics 3″ serie WTE |
| Espuma de flotabilidad | Espuma de poliuretano R-3318 |
| Peso de los lastres | 9 x 200 g de acero inoxidable |
| Conector de la batería | XT90 |
| Desempeño | |
| Máxima profundidad de operación | 100 m (housing de acrílico), 300 m (housing de aluminio) |
| Rango de temperatura | 0 – 30°C |
| Máxima velocidad de avance | 1.5 m/s |
| Propulsores | Blue Robotics T200 |
| ESC | Blue Robotics ESC básico de 30A |
| Configuración de propulsores | 6 x propulsores (4 vectorizados, 2 verticales) |
| Fuerza de empuje hacia adelanta de los propulsores (45°) | 9 kgf |
| Fuerza de empuje vertical de los propulsores | 7 kgf |
| Fuerza de empuje vertical de los propulsores (45°) | 9 kgf |
| Luces | |
| Brillo | 1500 lumens cada una con control de atenuación |
| Ángulo del haz de luz | 135° con inclinación (tilt) ajustable |
| Cable umbilical | |
| Diámetro | 7.6 mm |
| Longitud | 25 – 300 m |
| Fuerza de trabajo | 45 kgf |
| Resistencia a la rotura | 160 kgf |
| Revestimiento | Kevlar con compuesto a prueba de agua |
| Flotabilidad en agua dulce | Neutra |
| Flotabilidad en agua salada | Ligeramente positivo |
| Peso | 0.043 kg/m |
| Sensores | |
| IMU | 6 – DOF (para navegación) |
| Brújula | Magnetómetro dual 3-DOF |
| Presión interna | Blue Robotics BAR30 |
| Sensor de corriente y voltaje | Blue Robotics Módulo de sensor de potencia |
| Sensor de navegación | Integrado para navegación |
| Inclinación (tilt) de la cámara | |
| Rango de inclinación (tilt) | +/- 90 grados (180 de rango total) |
| Servo para inclinación (tilt) | Hitec HS-5055MG |
| Cámara | |
| FoV (bajo el agua) | 110 grados (horizontal) |
| Sensibilidad a la luz | 0.01 lux |
| Resolución | 1080p |
| Sistema de control | |
| Interfaz del cable umbilical | Fathom-X |
| Autopilot | Navegación de Blue Robotics |
| Software de control | ArduSub + BlueOS |
| Requerimientos del sistema | |
| Windows | Windows 10 64bit o superior |
| MacOS | 10.20 o superior |
| Ubuntu | LTS (20.04) o superior |
| Hardware recomendado | |
| Procesador | i5 equivalente o superior |
| Tarjeta gráfica Discrete Nvidia o AMD | |
| RAM | 8GB |
| Almacenamiento | Solid-state drive (SSD) |
Dibujos 2D