Description
Descripción del producto
Navigator Flight Controller
El Navigator Flight Controller es una placa de expansión que se conecta al Raspberry Pi 4 y lo convierte en un controlador de vuelo completamente funcional, listo para alimentar vehículos y robots operados de forma remota, como drones, vehículos terrestres, ROVs, y cualquier sistema móvil.
En su núcleo, el Navigator es una colección de entradas y salidas. Tiene entradas de sensores integrados, salidas a servomotores o controladores de velocidad, y puertos de expansión que pueden conectarse a dispositivos externos. El Navigator cuenta con lo siguiente:
- IMU de 6 ejes con acelerómetros y giroscopios para orientación
- Doble magnetómetro de tres ejes para dirección de la brújula
- Barómetro para medir altitud en el aire
- 16 salidas de canal PWM para servomotores
- Entradas de corriente y voltaje ADC
- Entrada de receptor RC (SBUS)
- Indicador LED RGB de estado
El kit Navigator se envía con una tarjeta SD cargada con BlueOS, software operativo central para ROVs, USVs y otros robots desarrollado por Blue Robitcs. Este software está basado en Raspbian Linux, proporciona una serie de características que incluyen gestión de software de piloto automático, transmisión de video, actualizaciones de software y extensiones definidas por el usuario. Te permite comenzar rápidamente con los firmwares Navigator y ArduPilot.
El diseño esquemático del Navigator es de código abierto y está disponible para ayudarte a maximizar su uso.
Además, el Navigator cuenta con conectores de expansión disponibles, todos siguiendo el Estándar de Conector Pixhawk y siendo compatibles con la mayoría de los accesorios de piloto automático de la industria. Tiene los siguientes puertos de expansión:
- 4 puertos serie
- 2 puertos I2C
- 2 puertos de conversor analógico-digital (ADC) de 16 bits
- Puerto de LED externo compatible con LEDs RGB Neopixel
También, el Navigator cuenta con varias características importantes que vale la pena resaltar:
- Doble entrada de alimentación con conmutación automática para redundancia
- Lógica de 3,3V en todos los puertos
- Tolerancia de 5V en los puertos serie
El Navigator viene con un disipador de calor de aluminio diseñado a medida que se ajusta entre el Navigator y el Raspberry Pi y permite que el Raspberry Pi funcione a alta carga de CPU en entornos mal refrigerados, como dentro de una carcasa. Hay una ranura en la placa Navigator que te permite utilizar el conector de cámara CSI del Raspberry Pi.
El kit Navigator también incluye un conjunto de cables de expansión para los puertos serie, I2C y ADC para permitirte conectar tu hardware de manera rápida y sencilla.
¿Qué incluye?
- 1 x Placa PCB del Navigator
- 1 x Disipador de calor del Navigator
- 1 x Soporte de montaje de Raspberry Pi
- 1 x Tarjeta microSD de 16GB con BlueOS
- 3 x Pads térmicos
- 2 x Cable JST GH de 3 pines para accesorios/expansión
- 1 x Cable JST GH de 4 pines para accesorios/expansión
- 3 x Cable JST GH de 6 pines para accesorios/expansión
- 2 x Detectores tipo espuma para humedad o “inundación”, longitud de 30 cm
- 4 x Tornillo de cabeza bristol M2.5×8
- 2 x Tornillo de montaje #3-28×3/8
Detalles técnicos
| Parámetro | Valor | |
|---|---|---|
| Características eléctricas | ||
| Suministro de voltaje | 5–5.35 V (Entrada principal) 5–5.35 V (Conector de módulo de potencia) 5–5.35 V (Aux) |
|
| Consumo de corriente | 5 mA (en reposo) 150 mA (típico) 200 mA (Máx) |
|
| Nivel de voltaje lógico | 3.3 V (5 V máxima tolerancia) | |
| PWM Nivel de voltaje de la señal | 3.3 V | |
| Máxima entrega de potencia a Raspberry Pi y periféricos | 4 A continuo, 4.5 A pico | |
| Desempeño | ||
| Rango del sensor de temperatura | 300–1100 mbar | -900–9000 m |
| Precisión relativa del sensor de presión | 0.12 mbar | 1 m |
| Precisión absoluta del sensor de presión | 1 mbar | 8 m |
| Resolución del sensor de presión | 0.0016 mbar | 1.5 cm |
| PWM precisión | ±0.5 µs (@ 50, 100, 200, 250, 400, 500 Hz) |
|
| PWM Resolución | 1 μs @ 250 Hz | |
| ADC Resolución | 16 bits (14.4 bits efectivos) |
|
| Sensores a bordo | ||
| IMU de 6-ejes | ICM-20602 | |
| Magnetómetro digital de 3-Ejes | MMC5983 | |
| Brújula electrónica de 3-Ejes | AK09915 | |
| Sensor digital de presión (Barómetro) | BMP280 | |
| Convertidor Análogo a Digital (ADC) | ADS1115 | |
| ICs a bordo | ||
| Módulo PWM de 16 canales con Oscilador Externo | PCA9685 | |
| Conversor de Voltaje Lógico | TXS0102 | |
| Mux de Potencia y Diodo Ideal | TPS2121 | |
| ICs Adicionales | Inversor Serial para receptores RC 3.3 V a 5 V conversión para LEDs RGB neopixel 4KB EEPROM |
|
| Puertos/Interfaces (ver Imagen más abajo) | 3 x Serial UART (sin control de flujo) 2 x I2C 1 x UART + I2C 1 x ADC (3.3 V) 1 x ADC (6.6 V) 1 x Receptor RC 1 x Conector para módulo de potencia 16 Canales de salida PWM 2 x conectores 2-pin JST-GH (detectores de inundación Blue Robotics) 1 x conector auxiliar de 3 pin (20 mA – 5V) (Tarjeta de detector de inundación Blue Robotics) 1 x salida PWM (ventilador) 1 x cabezal LED RGB 3 x LEDs disponibles para el usuario |
|
| RC Compatibilidad de Receptor | SBUS, Crossfire, IBUS (receptores seriales invertidos/no-invertidos) |
|
| Librerías de desarrollo | Navigator Python / C++ Navigator Rust |
|
| Normativa | RoHS (libre de plomo) | |
| Características Físicas | ||
| Temperatura de operación | -40°C to 60°C | -40°F to 140°F |
| Temperatura de almacenamiento | -40°C to 85°C | -40°F to 185°F |
| Peso | 26 g | |
| Dimensiones | 65 x 56 mm | |
| Espaciado de los agujeros para tornillos | 58 x 49 mm | |
| Diámetro de agujeros para tornillos | 2.75 mm | |
| Peso de disipador de calor | 30 g | |
| Dimensiones del disipador de calor | 65 x 56 x 14 mm | |
| Material del disipador de calor | Aluminio Anodizado 6061-T6 | |
| Agujeros de montaje del disipador de calor | M2.5×0.45 | |
| Material de los pads térmicos | Silicone | |
| Longitud de cable incluido | 200 mm | |
| Tipo de cable | UL1571 28AWG aislamiento PVC | |
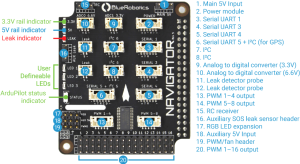
Para mayor información acerca del pinout del Navigator, puedes consultar en Navigator Flight Controller Technical Details.